Object Localization
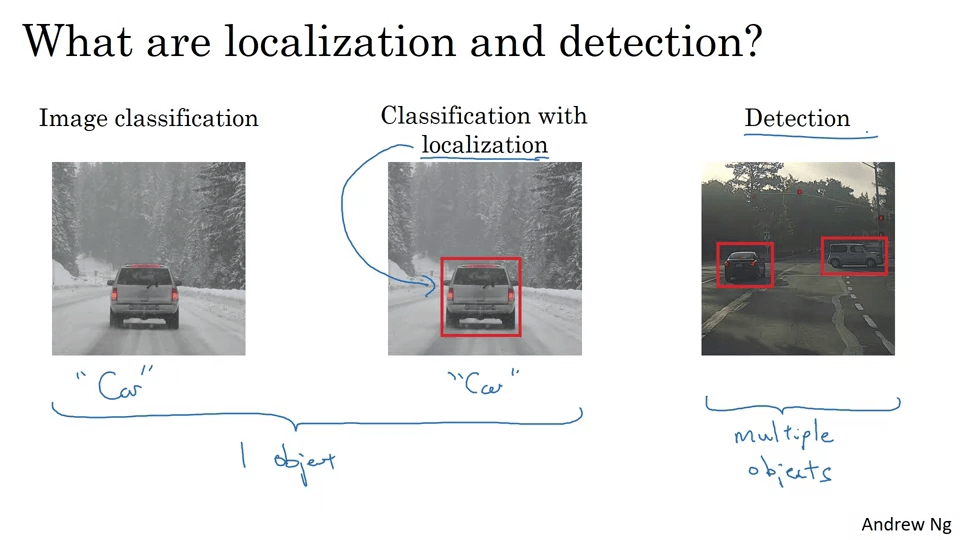
객체 감지를 하려면 먼저 객체 현지화에 대해 알아야 한다.
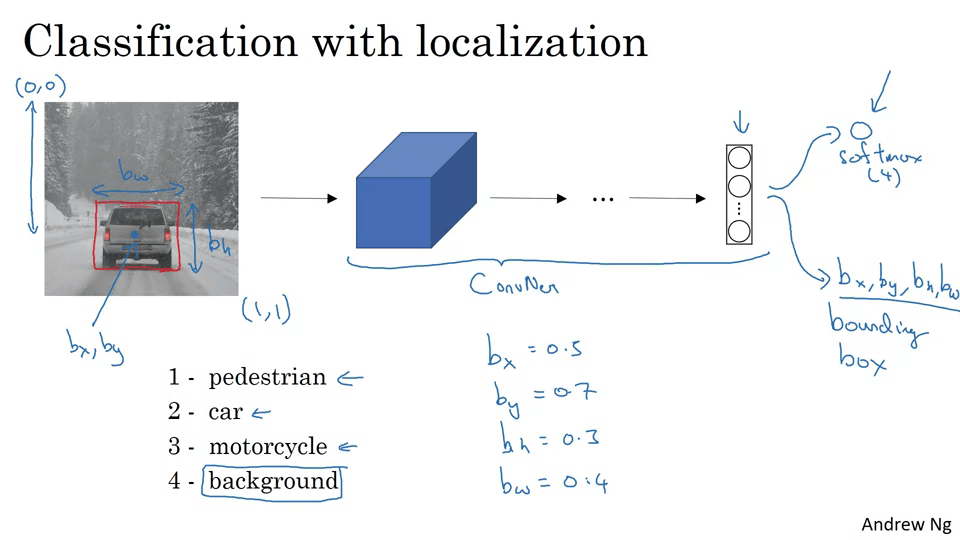
자동차를 구분하는 것뿐만 아니라, 박스를 그리기 위해 bx, by, bh, bw를 출력값으로 갖는다.
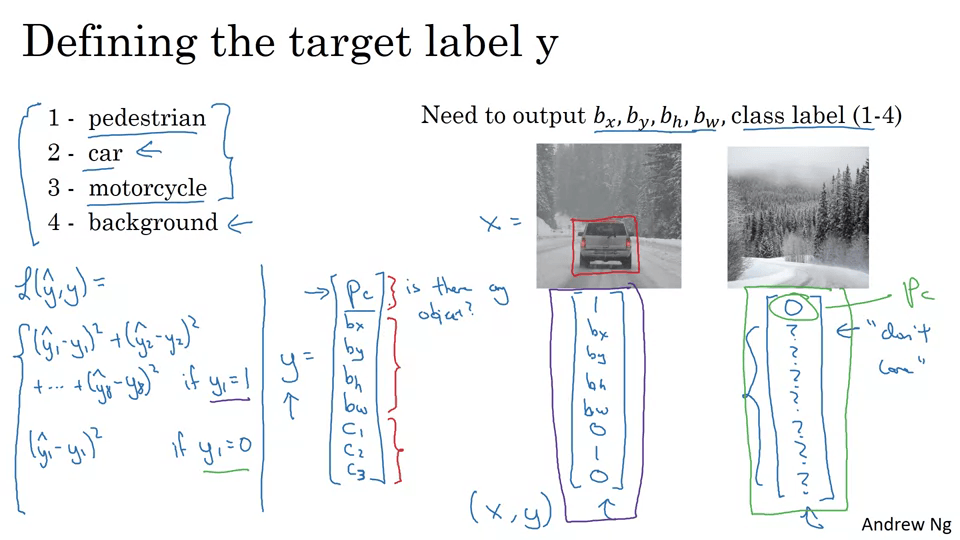
손실함수 주목.
Landmark detection
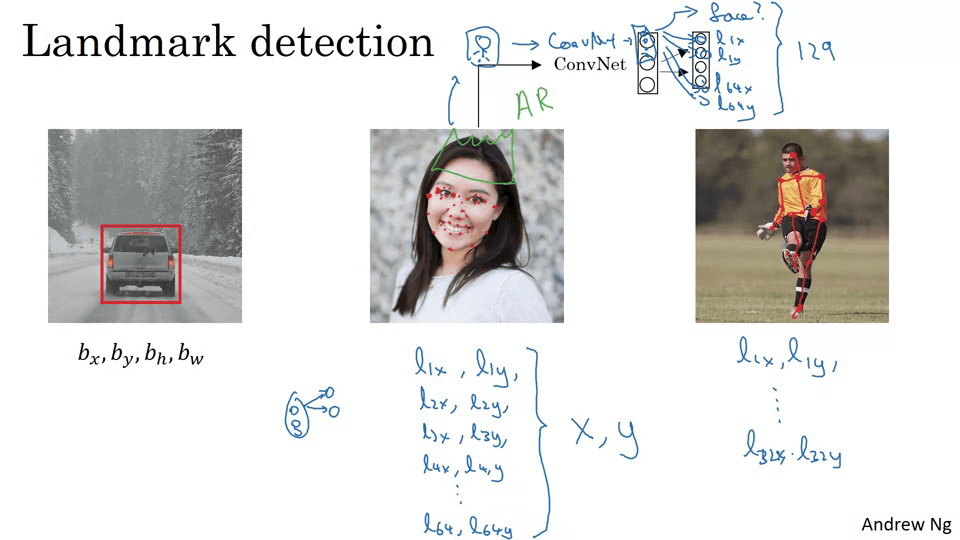
랜드마크(점)을 여러개 탐지해서 표정을 보고 감정을 유추할 수 있다.
동작을 보고 뼈대를 만들어서 동작을 인지할 수 있다.
Object detection
슬라이딩 윈도우 감지 알고리즘이라는 것을 사용한다.
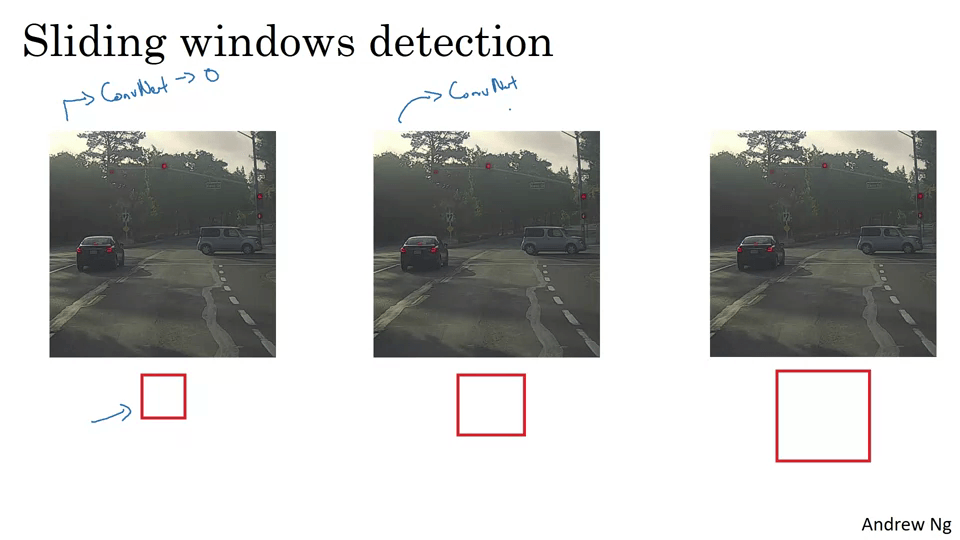
자동차가 있으면 1, 없으면 0이다. 전체 이미지에서 작은 사각형 크기만큼 잘라서 ConvNet에 입력하고 출력값을 본다.
더 큰 사각형으로 동일하게 반복한다. 사각형이 너무 작으면 계산 비용이 커진다.
Convolutional Implementation of Sliding Windows
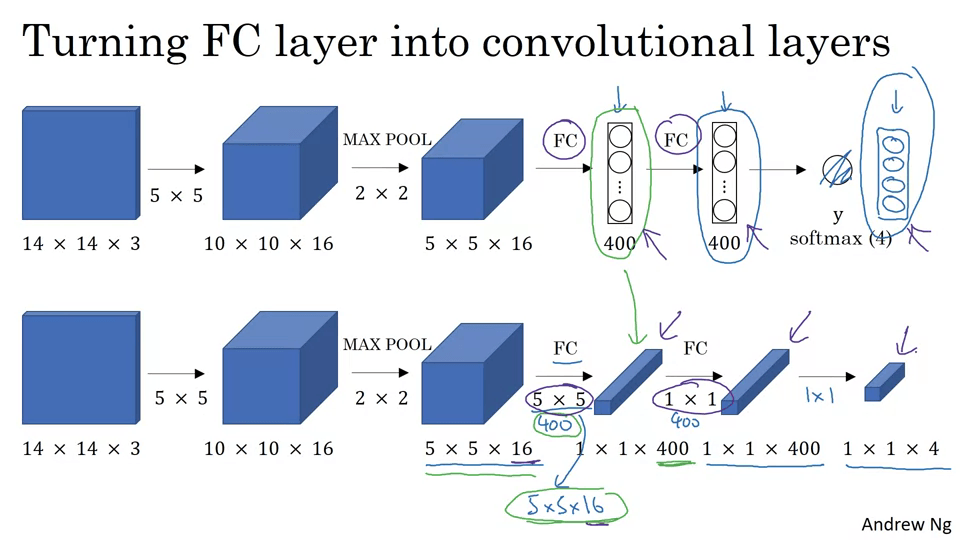
FC를 Convolutional Layer로 표현할 수 있다.
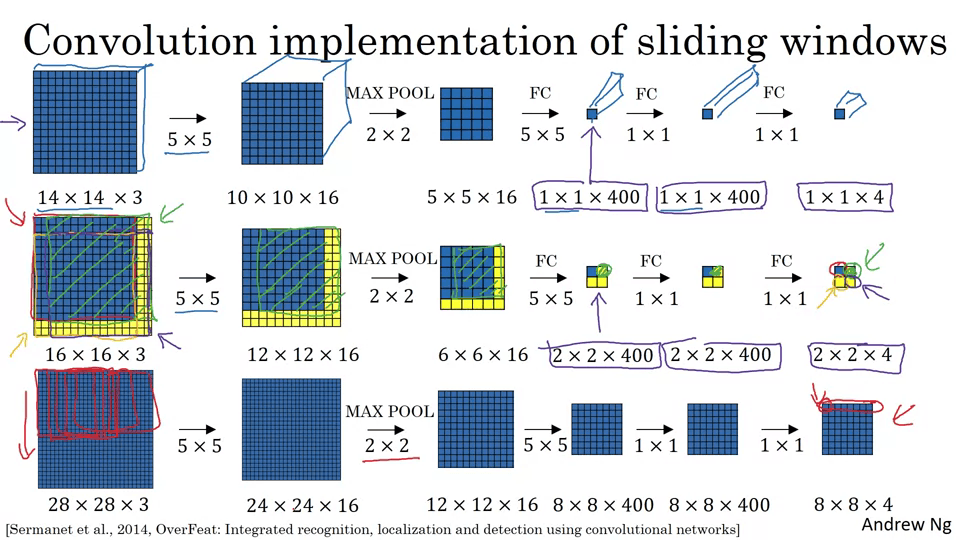
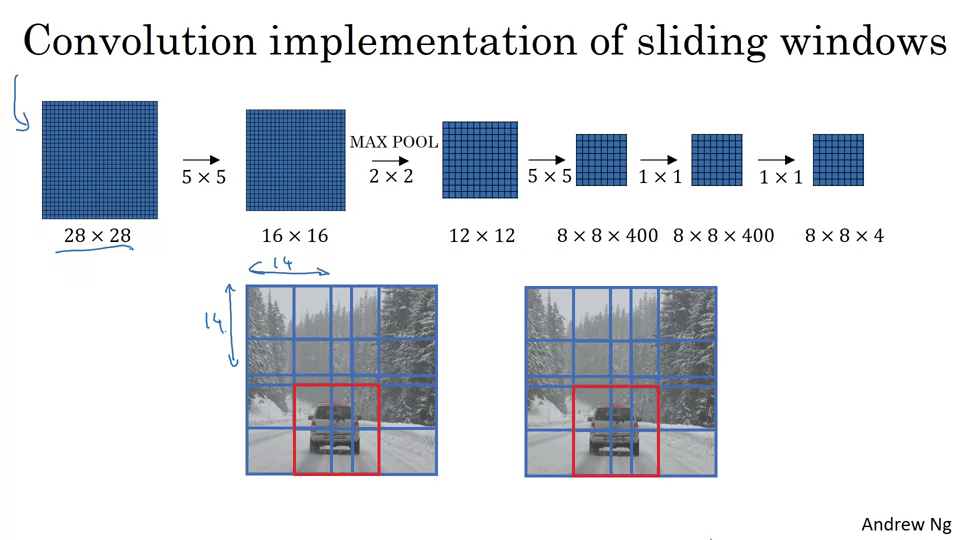
이 방법은 바운딩 박스가 정확하지 않다는 단점이 있다.
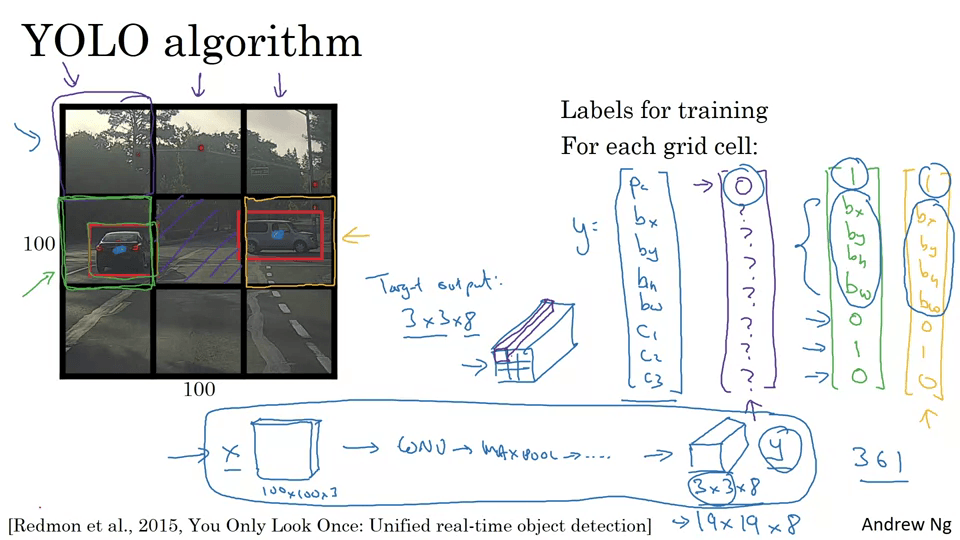
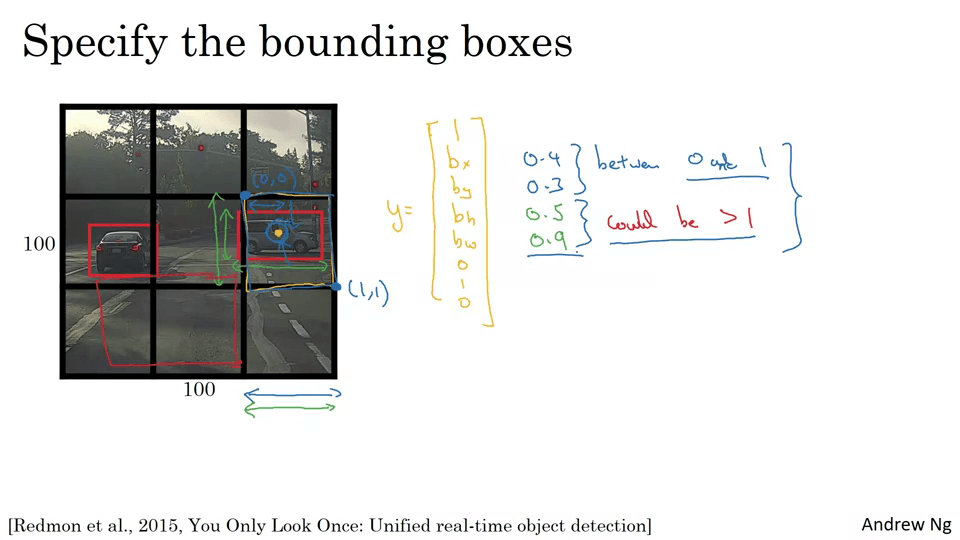
Bounding box predictions
슬라이딩 윈도우로 순회하는 박스들이 자동차에 정확히 맞지 않음. 정확하게 박스를 예측하는 방법은 YOLO 알고리즘을 사용하는 것이다. (You Only Look Once)
Intersection Over Union
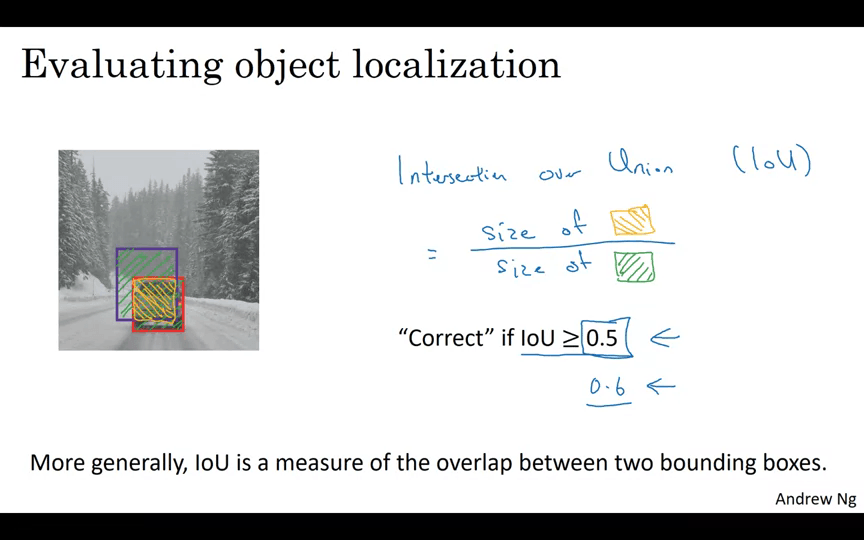
예측된 경계 상자와 실측된 경계 상자. 두 개의 경계 상자의 합집합에 대한 교집합 비율을 계산
0.5 이상이면 정답으로 판단한다.
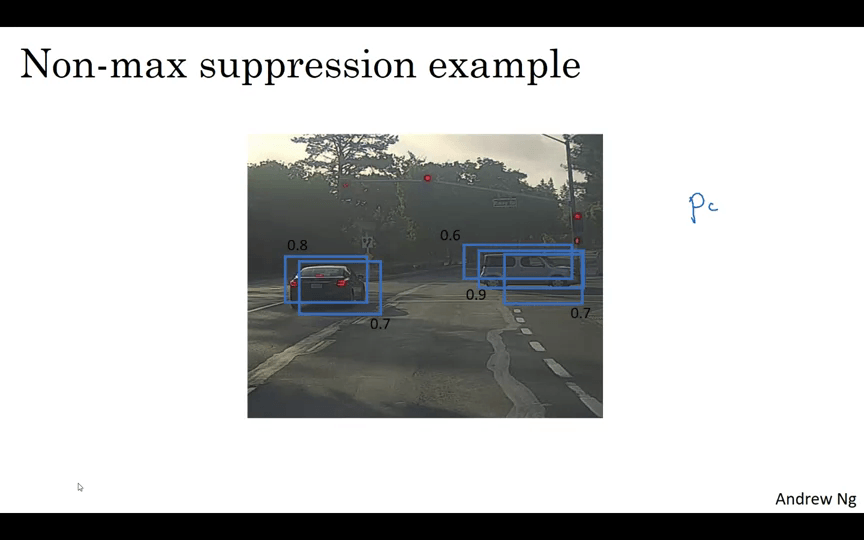
알고리즘이 객체를 여러번 탐지하게 된다. Non-max Suppression을 이용해 객체를 한번만 탐지하는지 확인할 수 있다. IOU가 최대치인 것만 남겨두고 나머지는 다 제거한다. 출력 클래스당 1회씩 실행한다.
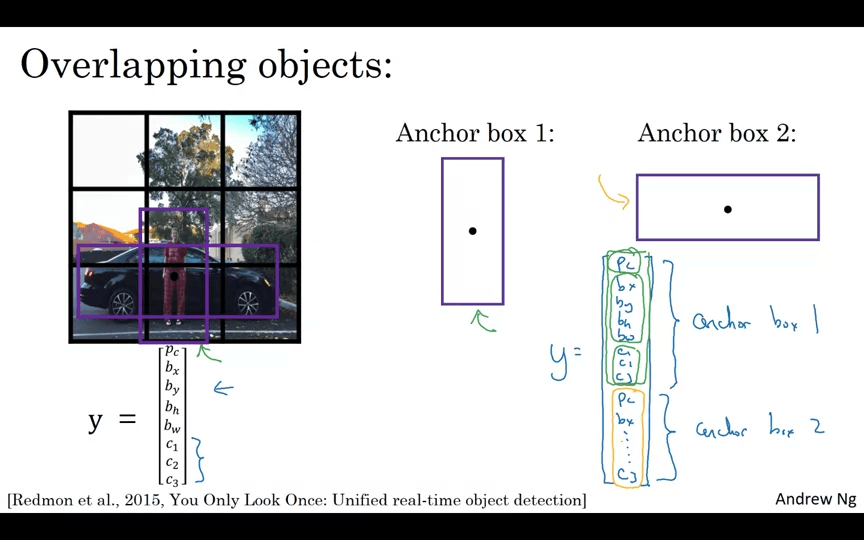
격자판 셀이 여러 객체를 탐지하려면 Anchor Boxes를 사용한다.
여러 Anchor Box가 생기면 Ouput이 달라진다.
- 기존 → 3 x 3 x 8
- 2개의 Anchor Box → 3 x 3 x 16
그리드 셀에 객체가 3개 몰려있다면 정상적으로 처리할 수 없다.
두 Anchor Box가 동일한 모양이라면 정상적으로 처리할 수 없다.
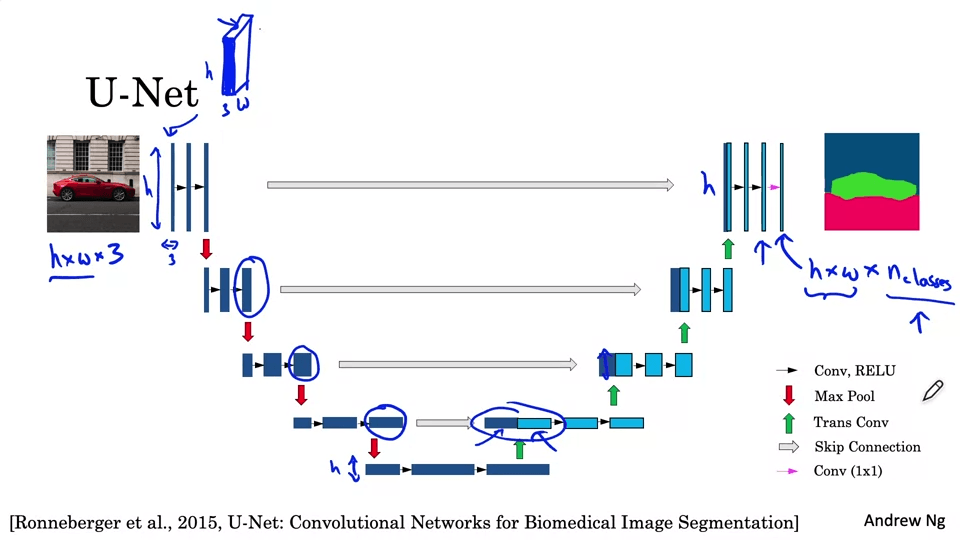
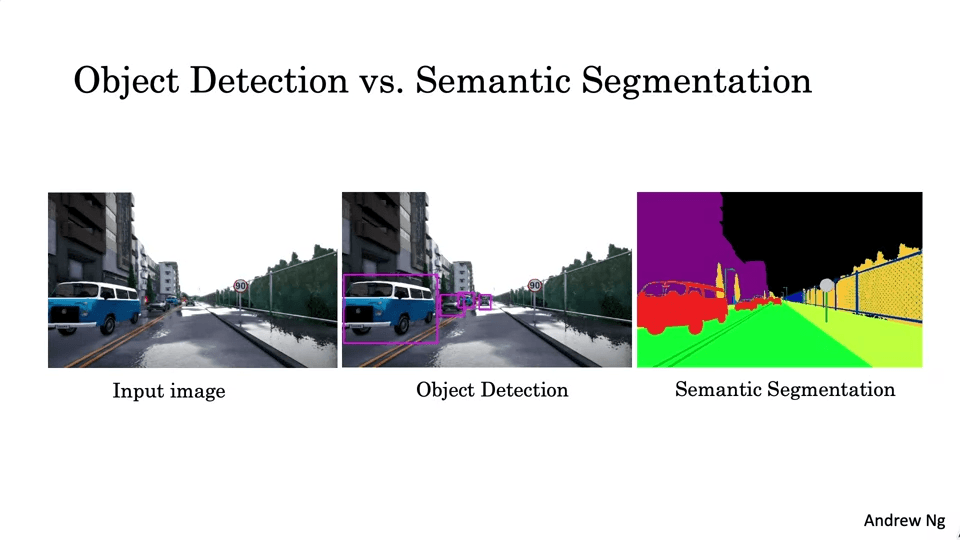
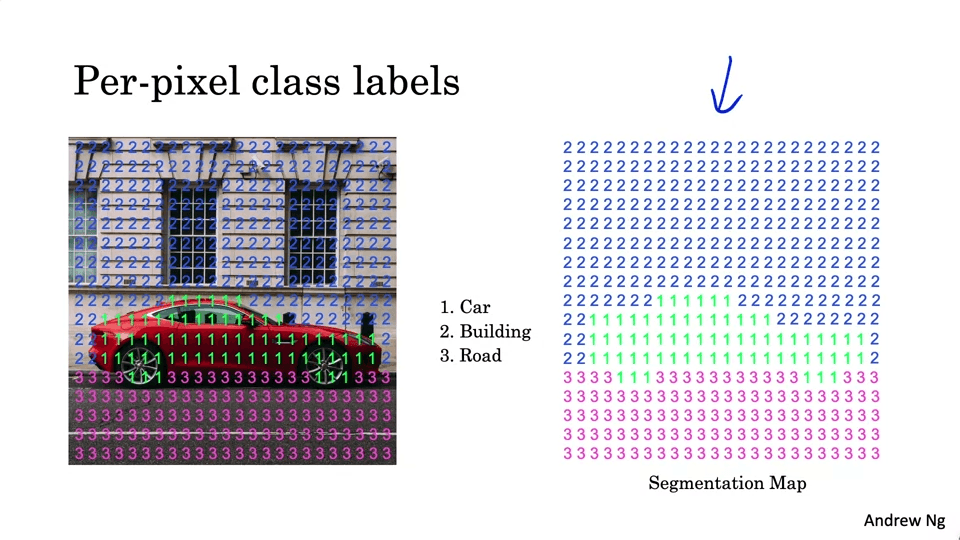
Semantic Segmentation with U-Net
탐지된 객체 주위에 면밀한 경계를 그리는 것
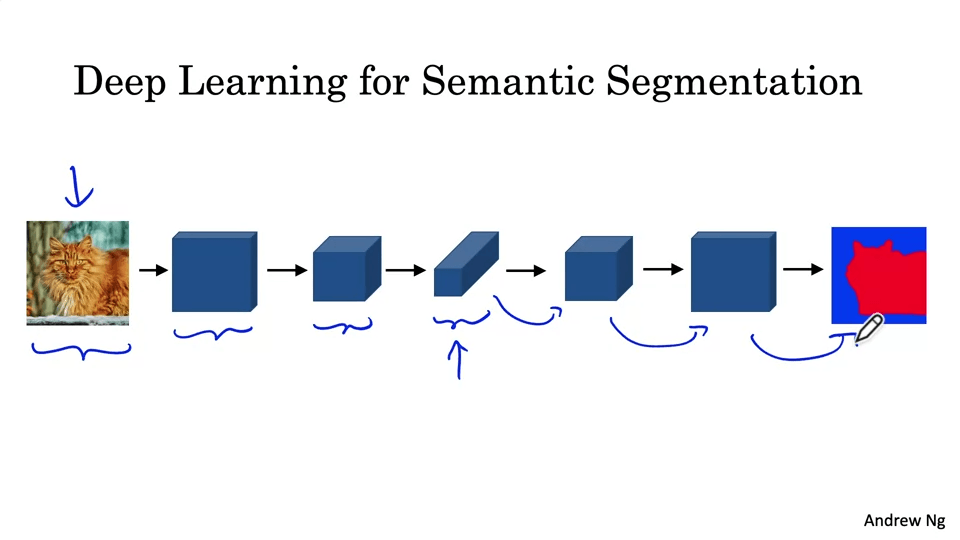
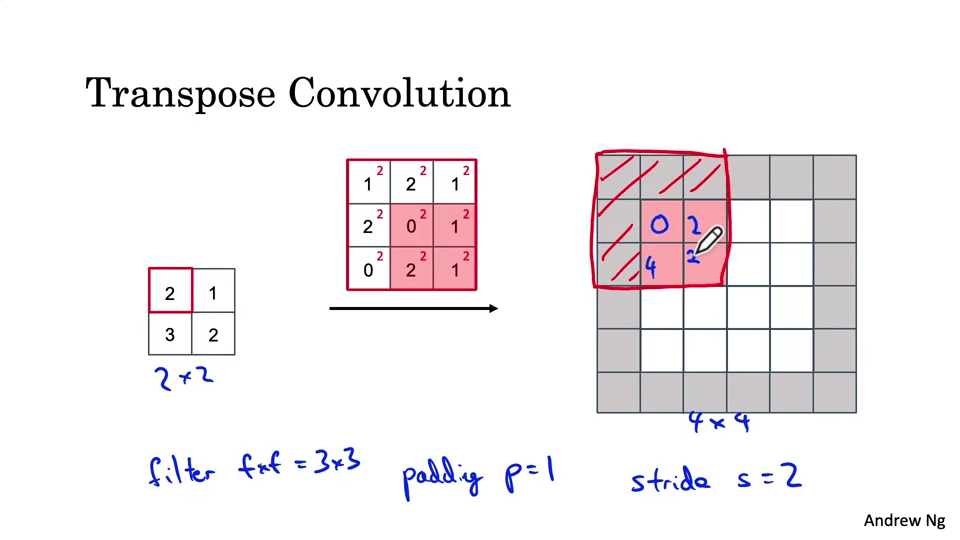
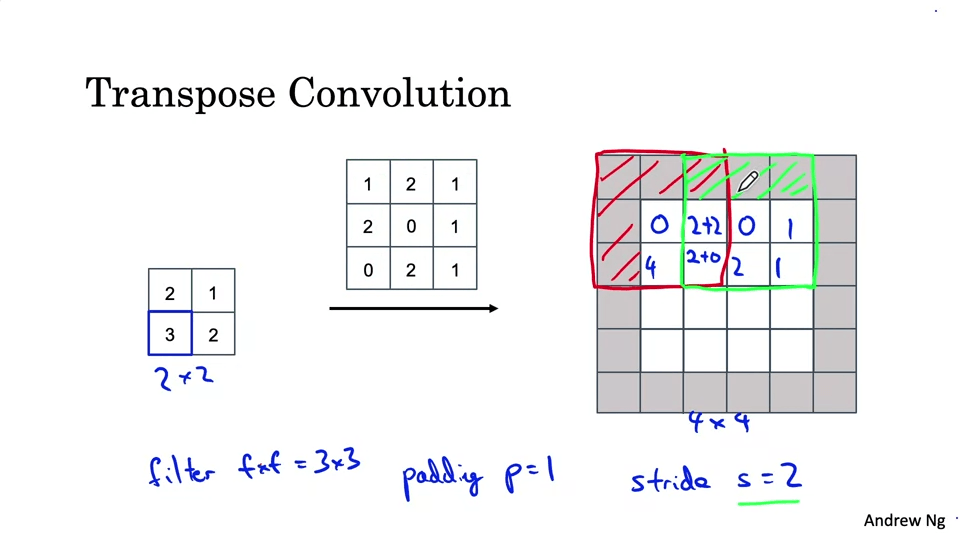
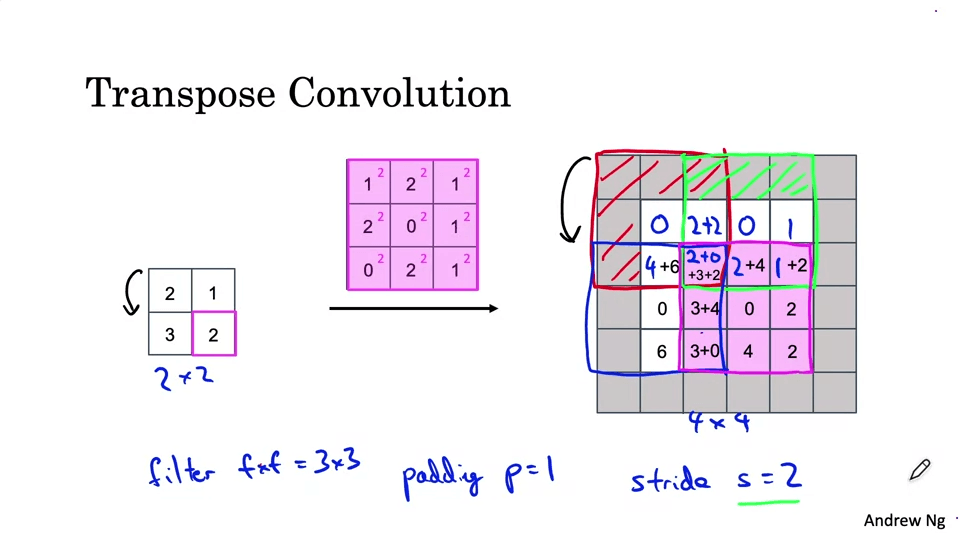
모델 크기가 점점 작아지다가, 출력을 위해 다시 키워줘야 한다. 이를 위해서는 Transpose Convolution을 사용한다.
U-Net Architecture